Description

|
|
Created by Guadalupe García
almost 4 years ago
|
|
Page 1
Es un arreglo de componentes cuyo objetivo es comandar o regular la respuesta de una parte del proceso conocida como planta sin que el operador intervenga en forma directa sobre sus elementos de salida. El operador manipula únicamente magnitudes de baja potencia denominadas de consigna, mientras que el sistema de control, a través de accionamientos conectados en sus salidas, se encarga de producir los cambios energéticos en la planta.
Page 2
Sistema de control en lazo abierto.
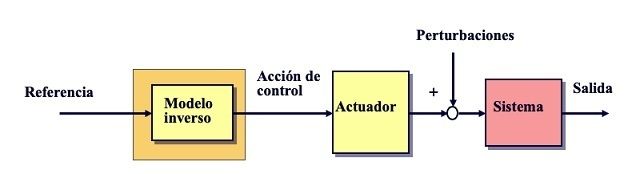
Es aquél en el cual la acción de control es independiente de la / las señales de salida, es decir, no recibe ningún tipo de información del comportamiento de la planta.
{kind=link}
Estos sistemas se caracterizan por: Ser sencillos y de fácil mantenimiento. Estar afectados por perturbaciones Depender altamente de la calibración del sistema.
Page 3
Un ejemplo sería una lavadora “automática” común, ya que ésta realiza los ciclos de lavado en función a una base de tiempo, sin medir el grado de limpieza de la ropa, que sería la salida a considerar.
Otro ejemplo sería una tostadora: al hacer una tostada, se coloca el tiempo que suponemos suficiente para que el pan salga con el grado de tostado que queremos, mas la tostadora no puede decidir si ya esta suficientemente tostado o no.
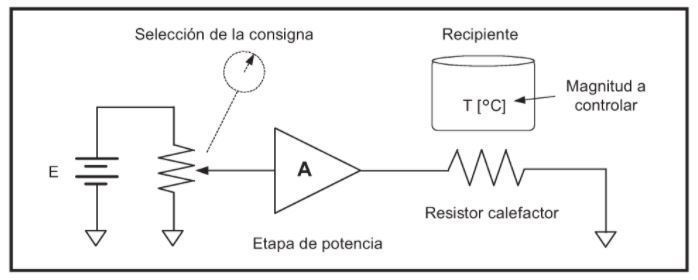
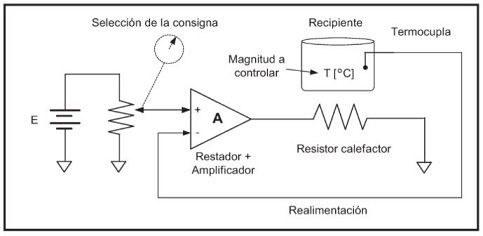
En la siguiente figura, se muestra un sistema de control cuyo objetivo es controlar la temperatura dentro del recipiente. El operador ajusta el valor de temperatura deseado mediante el potenciómetro (magnitud de consigna o setpoint) y, de acuerdo a la posición del mismo, sistema se encargará de aumentar la corriente sobre el resistor calefactor mediante su etapa de potencia. A mayor calentamiento, aumento de temperatura dentro del recipiente.
{kind=link}
Este sistema de control requiere de una calibración inicial. Para lograrla, se debe medir el valor de temperatura dentro del recipiente para diferentes posiciones del mando del potenciómetro e ir rotulando el mismo en términos de temperatura. De esta forma, el operador puede luego seleccionar, a través del cursor, la temperatura deseada dentro del recipiente (magnitud de consigna) y el sistema de control suministrará la potencia necesaria para conseguirla.
Page 4
El sistema de control no realizará acción alguna para compensar variaciones en la temperatura del recipiente en caso de perturbaciones externas, tales como, variación de la temperatura ambiente, cambios en la densidad del líquido, etc.
{kind=link}
Page 5
Sistemas de control en lazo cerrado.
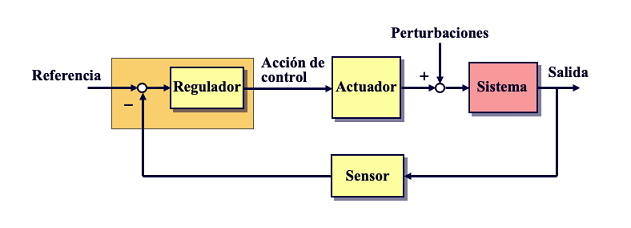
Es aquél en el cual la acción de control es, en cierto modo, dependiente de la/las señales de salida.
{kind=link}
Lo normal es que el sistema de control se encargue de la toma de ciertas decisiones ante determinados comportamientos de la planta, hablándose entonces de sistemas de control automáticos. Para ello se requiere la existencia de sensores que detecten el comportamiento de dicha planta y brinden, mediante interfaces de adaptación, estas señales a las entradas del sistema de control quien se encargará de ejecutar las acciones correctivas.
Page 6
Los sistemas de el control en bucle cerrado son los verdaderos sistemas de control automático que hacen que un producto o proceso tome decisiones sin necesidad de la intervención de un ser humano y por ello suelen recibir el nombre de sistemas de regulación automática o simplemente reguladores. Sus características son: Ser complejos y amplios en cantidad de parámetros. Ser más estables frente a perturbaciones y variaciones internas.
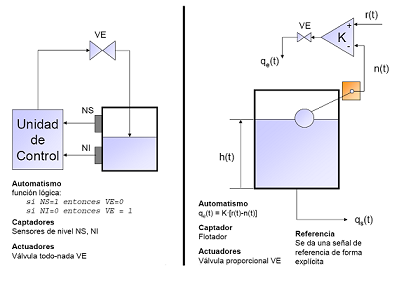
Un ejemplo de sistema de control lógico en bucle cerrado es el control del nivel de agua de un depósito. La entrada de agua al depósito depende del nivel de agua en cada momento.
Otro ejemplo de sistema de control en bucle cerrado es el de control de la velocidad de un motor de corriente continua. Para ello dicha velocidad se mide mediante un taquímetro cuya salida se conecta a la entrada del sistema de control.
Page 7
En la siguiente figura, se puede apreciar un control de temperatura a lazo cerrado que incorpora una termocupla como dispositivo sensor. Esta termocupla brinda una diferencia de potencial proporcional a la temperatura medida, que se reinyecta a la entrada como resta de la magnitud de consigna. Por lo tanto, una vez ajustado el valor de referencia, si la temperatura en el recipiente tiende a subir debido a una perturbación externa, también lo hará la tensión de la termocupla, haciendo que el valor a restar sea mayor y, en consecuencia, disminuya la corriente sobre el resistor calefactor. Esto hará que la temperatura disminuya compensando así el alza que produjo a partir de la perturbación. En consecuencia, el sistema de control reaccionó de forma automática para mantener la variable de salida constante.
{kind=link}
Page 8
{kind=link}
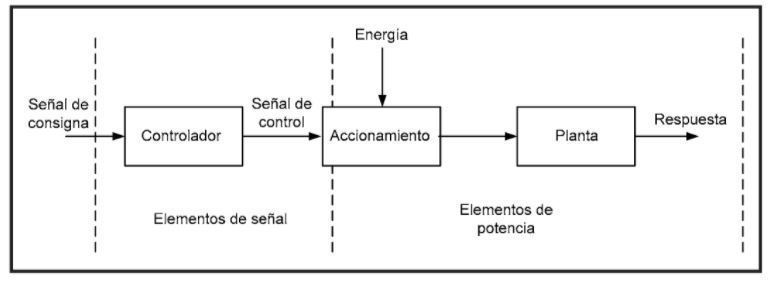
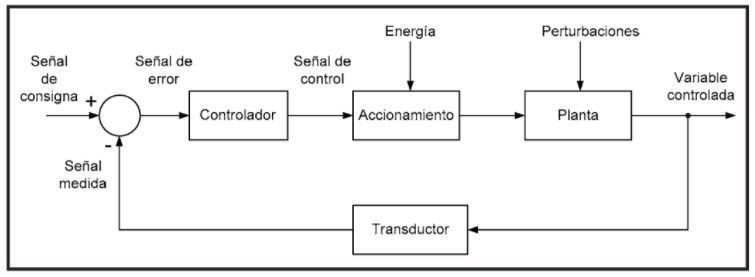
El bloque controlador compara el valor efectivo de la salida de la planta con el valor deseado o de referencia, generando así la señal de error y la señal de control. La forma o tipo de respuesta con que el sistema de control produce la señal de control recibe el nombre de acción de control. Las acciones de control más comunes son las siguientes: Control de dos posiciones: ON — OFF. Control Proporcional + Integral: PI. Control Proporcional + Derivativo: PD. Control Proporcional + Integral + Derivativo: PID.
Page 9
Control secuencial y control continuo.
A la hora de controlar un proceso industrial, lo primero es identificar el tipo de señales con las que se va a trabajar. Las variables involucradas en un proceso industrial pueden ser de dos tipos: Señales todo-nada o binarias (on-off signals): sólo pueden tener dos valores diferentes en régimen permanente a lo largo del tiempo y por lo cual se las denomina digitales. Por ejemplo: botón pulsado / no pulsado, válvula abierta / cerrada, presencia de objeto / no presencia. Señales analógicas (analog signals) que pueden tener cualquier valor dentro de unos determinados márgenes y que llevan la información en su amplitud. Un ejemplo de variable analógica es la velocidad un de un motor. Ejemplo: temperatura, humedad, luminosidad.
Page 10
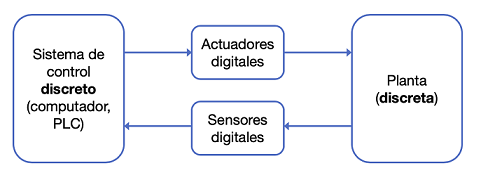
La planta que se desee controlar puede ser contInua (si utiliza señales analógicas) o discreta (si utiliza señales todo-nada o binarias). Y, a su vez, el controlador puede ser contInuo (analógico) o discreto (todo-nada o binario), atendiendo a la misma razón. Si la planta y el controlador son discretos, hablamos de sistemas de control lógico, controladores lógicos (logic controllers) o sistemas de control secuencial (sequential control systems).
{kind=link}
Page 11
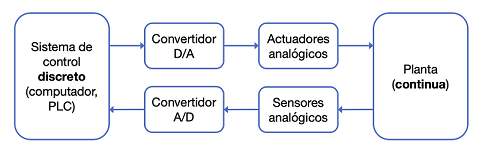
Si la planta es continua hablamos de sistemas de control de procesos continuos o simplemente sistemas de control de procesos (process control systems). Si el controlador es continuo, hablaremos de control continuo tradicional. Los sistemas analógicos de control suelen estar formados por electrónica analógica. Presentan la característica de no ser programables, es decir, que para cambiar la función que realizan hay que modificar los elementos que forman parte de ellos o el cableado entre los mismos. Si el controlador es digital, suele utilizar un microcontrolador como elemento central. Al control de procesos mediante un computador se le dio el nombre de control digital directo, conocido como DDC (Direct Digital Control). Estos sistemas utilizan convertidores analógico digital (CAD) para digitalizar las señales obtenidas de la planta, y convertidores digital analógico (CDA) para convertir las salidas del sistema de control a señales continuas en la planta.
{kind=link}
Page 12
Diferencia entre un control secuencial y un control continuo.
{kind=link}
Page 14
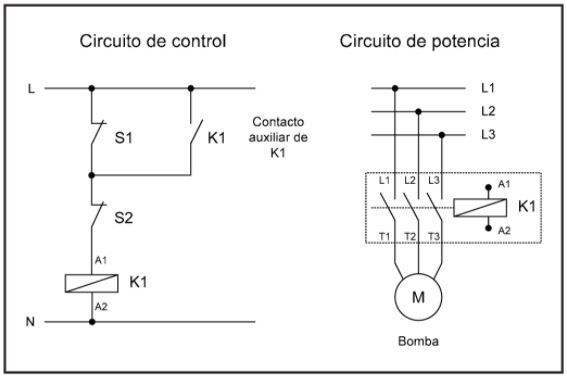
Existen diferentes alternativas para obtener un sistema automático que cumpla con lo requerido. Una posibilidad es mediante el uso de relés.
{kind=link}
Page 15
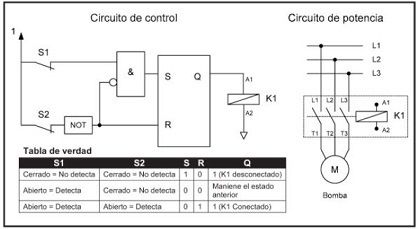
También, es factible implementar este sistema de control utilizando técnicas digitales con un circuito basado en un flip-flop SR (Set-Reset).
{kind=link}
Page 16
Otra alternativa, es resolver este simple automatismo aplicando un PLC. Para utilizar un PLC como controlador del nivel del tanque será necesario entonces conectar cada detector a una entrada y el contactor K1 que comanda la bomba a una salida. Luego se necesita realizar el programa en una PC para después ser descargado al PLC mediante un cable de comunicación.
Page 17
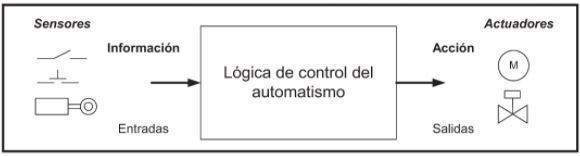
Componentes de un automatismo.
Los automatismos están compuestos por tres partes fundamentales: La obtención de señales mediante sensores. El procesamiento de dichas señales por lógicas de control. La ejecución de las respuestas mediante los actuadores.
{kind=link}
Page 18
Diseño de un automatismo.
Numerosos procesos industriales consisten en la realización de una serie de actividades u operaciones, de forma iterativa y siguiendo una secuencia determinada.
Diagrama espacio - fase.
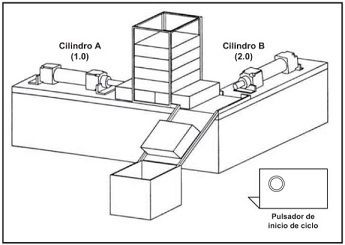
El primer paso para el diseño de un automatismo es establecer en forma gráfica el trabajo que se va a realizar y el desarrollo de las secuencias o fases que componen el ciclo. Para ello, es conveniente empezar por representar, de una forma simple y esquemática, los mecanismos y los elementos motrices que se van a emplear. Veamos el siguiente ejemplo:
Page 19
{kind=link}
La secuencia de trabajo se puede representar por un tipo de diagrama en donde se expresan los recorridos de los cilindros en función del número de paso, denominando a esta representación diagrama espacio – fase.
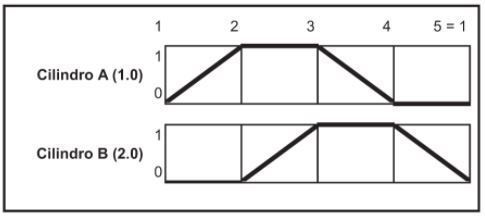{kind=link}
Cada fase de dicho gráfico corresponde a un cambio de estado del sistema. La línea de base identificada con el 0 indica la posición de reposo, mientras que la 1 representa al pistón extendido.
Page 20
Grafcet.
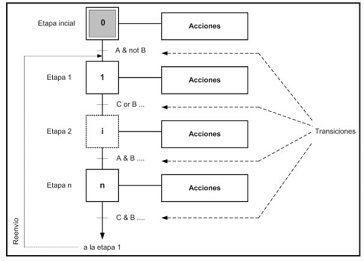
Una vez obtenido el diagrama espacio-fase es posible delinear fácilmente la lógica del automatismo. Una manera de hacerlo en forma independiente de la tecnología con la que se desarrollará, es emplear un método denominado grafcet (gráfico funcional de control de etapas y transiciones), el cual en particular es apropiado para los sistemas que presentan características secuenciales. Este método se basa en un conjunto de acciones y transiciones.
{kind=link}
Cada fase del diagrama espacio-fase se asocia a una etapa del grafcet. El símbolo empleado para representar una etapa es un cuadrado con un número en su interior que indica el orden de ejecución. La descripción de las acciones que se llevarán a cabo en cada etapa se coloca a su derecha mediante una etiqueta.
Page 21
Asignación de entradas y salidas.
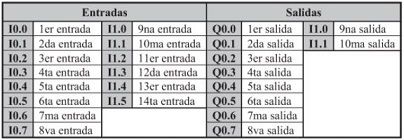
Los PLC disponen de un conjunto de entradas y salidas. Las entradas reciben las señales provenientes de los dispositivos de campo, tales como sensores e interruptores, mientras que las salidas accionan los motores, válvulas u otros aparatos que generan cambios energéticos en el proceso. Dependiendo del modelo del PLC, las entradas y salidas (E/S) pueden venir integradas en la CPU o bien como módulos de ampliación. Los PLC compactos incluyen, junto con la CPU, un mínimo de E/S, y luego tienen previstas una serie de unidades de expansión que les permiten ampliar considerablemente su capacidad. Las entradas y salidas vienen rotuladas sobre la bornera de conexión y, por lo general, disponen de un indicador luminoso que indica el estado.
{kind=link}
Page 22
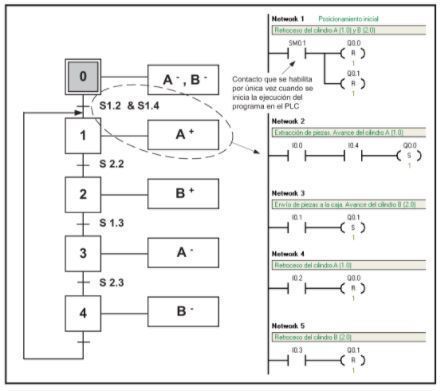
Desarrollo de la Lógica en Ladder.
El grafcet nos permite organizar la lógica de control de modo simple y sistemático. Cada condición de transición con su consecuente acción se puede corresponder con una línea de programa en lenguaje ladder.
{kind=link}
Want to create your own Notes for free with GoConqr? Learn more.