31096312
Beschreibung
Mindmap von YESIKA ANDREA BARRERA AGUIRRE, aktualisiert more than 1 year ago
|
|
Erstellt von YESIKA ANDREA BARRERA AGUIRRE
vor mehr als 3 Jahre
|
|
FASE 5 ESTATICA Y RESISTENCIA DE MATERIALES
- se divide en:
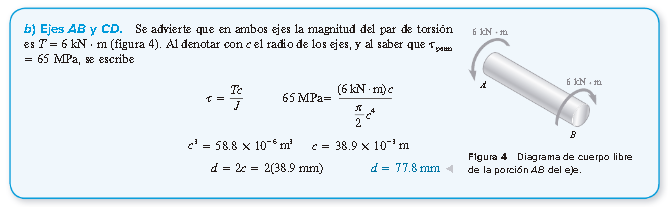
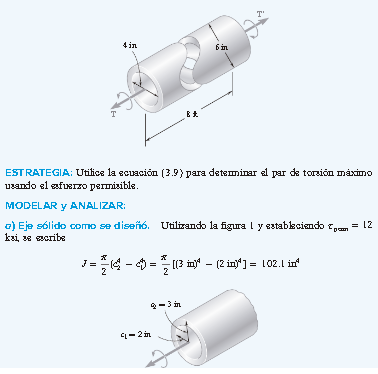
- TORSION
- Es el eje central que
conecta los
componentes del
motor
- La magnitud de esa rotación se
conoce como torsión (τ), la cual se
expresa en newton metros (N∙m). La
forma más básica de calcular la
torsión es que multipliques los
newtons de la fuerza ejercida por los
metros de distancia del eje.
- τ = F ⋅ r \tau = F\cdot r τ=F⋅rtau,
equals, F, dot, r. La dirección de la
torca se encuentra por convención
usando la regla de la mano derecha.
- se puede calcular (o medir en el
laboratorio) ese torque usando la
ecuación de la dinámica: torque
neto igual al producto de la inercia
rotacional por la aceleración
angular (τ neto = I α)
- La unidad de medida del torque en
el SI es el Nm (igual que para
trabajo, pero no se llama joule).
Ejemplo 6.1: Calcular el torque
respecto al origen, producido por
una fuerza F = (4i - 5j) N, que se
aplica a un objeto en la posición r =
(2i + j) m.
- La unidad de medida del torque en
el SI es el Nm (igual que para
trabajo, pero no se llama joule).
Ejemplo 6.1: Calcular el torque
respecto al origen, producido por
una fuerza F = (4i - 5j) N, que se
aplica a un objeto en la posición r =
(2i + j) m.
- se puede calcular (o medir en el
laboratorio) ese torque usando la
ecuación de la dinámica: torque
neto igual al producto de la inercia
rotacional por la aceleración
angular (τ neto = I α)
- τ = F ⋅ r \tau = F\cdot r τ=F⋅rtau,
equals, F, dot, r. La dirección de la
torca se encuentra por convención
usando la regla de la mano derecha.
- La magnitud de esa rotación se
conoce como torsión (τ), la cual se
expresa en newton metros (N∙m). La
forma más básica de calcular la
torsión es que multipliques los
newtons de la fuerza ejercida por los
metros de distancia del eje.
- Es el eje central que
conecta los
componentes del
motor
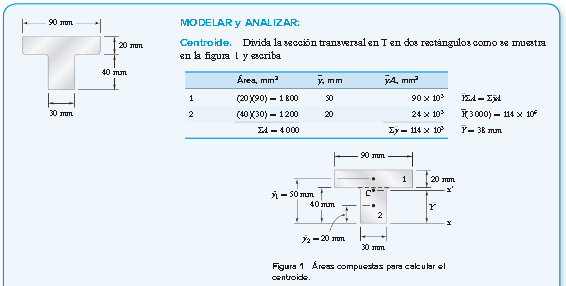
- FLEXIÓN
- esfuerzos normales y
la curvatura que
produce la flexión para
que el centro de la
barra con pesas
mostrada.
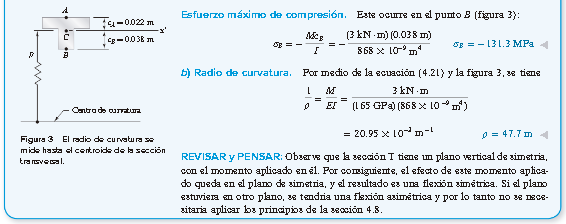
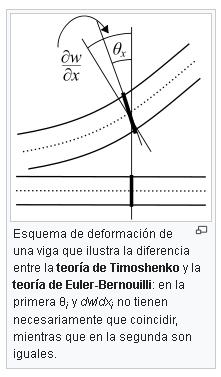
- La hipótesis de Navier-Euler-Bernoulli.
En ella las secciones transversales al eje
baricéntrico se consideran en primera
aproximación indeformables y se
mantienen perpendiculares al mismo
(que se curva) tras la deformación. La
hipótesis de Timoshenko. En esta
hipótesis se admite que las secciones
transversales perpendiculares al eje
baricéntrico pasen a formar un ángulo
con ese eje baricéntrico por efecto del
esfuerzo cortante.
- La hipótesis de Navier-Euler-Bernoulli.
En ella las secciones transversales al eje
baricéntrico se consideran en primera
aproximación indeformables y se
mantienen perpendiculares al mismo
(que se curva) tras la deformación. La
hipótesis de Timoshenko. En esta
hipótesis se admite que las secciones
transversales perpendiculares al eje
baricéntrico pasen a formar un ángulo
con ese eje baricéntrico por efecto del
esfuerzo cortante.
- esfuerzos normales y
la curvatura que
produce la flexión para
que el centro de la
barra con pesas
mostrada.
- TORSION
Medienanhänge
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Möchten Sie kostenlos Ihre eigenen Mindmaps mit GoConqr erstellen? Mehr erfahren.