1813869
Beschreibung
Quiz von 4574programming, aktualisiert more than 1 year ago
|
|
Erstellt von 4574programming
vor fast 10 Jahre
|
|
Frage 1
Frage
A subsystem represents...
Antworten
-
A specific part of the robot (ex. a motor)
-
A complicated task linked to user control that part of the robot does
-
A simple task part of the robot does
-
A broad section of the robot that has parts that work together
Frage 2
Frage
A Command represents...
Antworten
-
A broad section of the robot that has parts that work together
-
A simple task part of the robot does
-
A complicated task linked to user control that part of the robot does
-
A specific part of the robot (ex. a motor)
Frage 3
Frage
An "action" represents...
Antworten
-
A specific part of the robot (ex. a motor)
-
A simple task part of the robot does
-
A complicated task linked to user control that part of the robot does
-
A broad section of the robot that has parts that work together
Frage 4
Frage
The OI...
Antworten
-
Stands for Operator Interface
-
Links Joystick Input to actions
-
Links Joystick Input to commands
-
Specifies which commands are used by a subsystem
Frage 5
Frage
Teleop Mode...
Antworten
-
Does not include user input
-
Lasts longer than Autonomous
-
Is shorter than Autonomous
-
Is the "default" game mode
-
will utilize many different commands
-
will only have one command or command group run
Frage 6
Frage
Autonomous Mode...
Antworten
-
Does not include user input
-
Is the "default" game mode
-
will only have one command or command group run
-
will utilize many different commands
Frage 7
Frage
Which of these Commands should be set as default?
Antworten
-
DriveWithJoystick
-
FLManual
-
FLToggleUp
-
FLToggleDown
-
SLManualUp
-
SLManualDown
-
SLClose
-
SLCatch
-
MovePincerWithJoystick
Frage 8
Frage
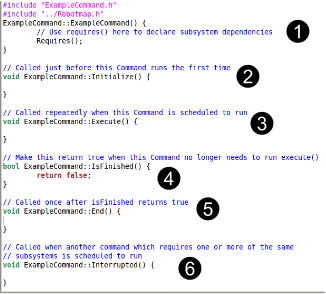
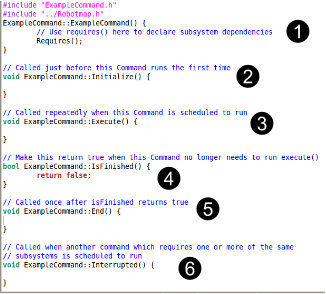
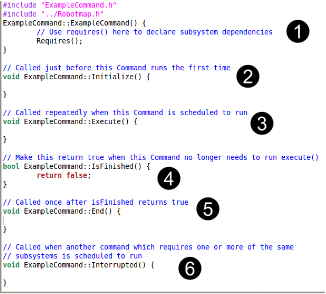
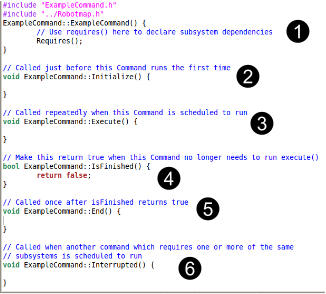
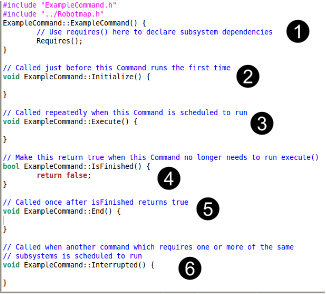
What is the first code your command runs when it is called, and is only run once before the command is called again?
{kind=link}
Antworten
-
1. The Constructor
-
2. The Initialize Function
-
3. The Execute Function
-
4. The IsFinished Function
-
5. The End Function
-
6. The Interrupted Function
Frage 9
Frage
Where should you place code that stops the command when it is done running?
{kind=link}
Antworten
-
1. The constructor
-
2. The Initialize Function
-
3. The Execute Function
-
4. The IsFinished Function
-
5. The End Function
-
6. The Interrupted Function
Frage 10
Frage
What is the code that tells your command when it is finished running?
{kind=link}
Antworten
-
1. The constructor
-
2. The Initialize Function
-
3.The Execute Function
-
4.The IsFinished Function
-
5.The End Function
-
6. The Interrupted Function
Frage 11
Frage
Where should you put code that will cancel the command when another command for the same subsystem is called?
{kind=link}
Antworten
-
1. The constructor
-
2. The Initialize Function
-
3. The Execute Function
-
4. The IsFinished Function
-
5. The End Function
-
6. The Interrupted Function
Frage 12
Frage
Where do you specify which subsystem your command uses?
{kind=link}
Antworten
-
1. The constructor
-
2. The Initialize Function
-
3. The Execute Function
-
4. The IsFinished Function
-
5. The End Function
-
6. The Interrupted Function
Frage 13
Frage
Code in which section will be run repeatedly every time the command is checked on?
{kind=link}
Antworten
-
1. The constructor
-
2. The Initialize Function
-
3. The Execute Function
-
4. The IsFinished Function
-
5. The End Function
-
6. The Interrupted Function
Frage 14
Frage
To create a drive system with 4 motors in RobotBuilder, you drag 4 speed controllers into the Chassis Subsystem folder.
Antworten
- True
- False
Frage 15
Frage
When creating a button linked to a robot arm moving to a specified position you could (reasonably) use which of the following:
Antworten
-
WhenPressed
-
WhenReleased
-
WhileHeld
Frage 16
Frage
When creating a button linked to a robot arm moving up as long as the user needs it to, you could (reasonably) use which of the following:
Antworten
-
WhenPressed
-
WhenReleased
-
WhileHeld
Frage 17
Frage
You never need to set default commands for subsystems
Antworten
- True
- False
Frage 18
Frage
Everything for the OI is created in RobotBuilder
Antworten
- True
- False
Frage 19
Frage
A red light next to "Communications" means you are missing a wireless connection to the robot
Antworten
- True
- False
Frage 20
Frage
You should always wear safety glasses when testing robot code
Antworten
- True
- False
Frage 21
Frage
If something breaks while you are testing the robot, you should keep testing to figure out what went wrong
Antworten
- True
- False
Frage 22
Frage
It doesnt really matter which mode the robot is in (Teleop, Autonomous, etc.), all the code is the same
Antworten
- True
- False
Frage 23
Frage
Battery voltages below 12.5 mean you need a new battery
Antworten
- True
- False
Möchten Sie mit GoConqr kostenlos Ihre eigenen Quiz erstellen? eigenen Mehr erfahren.