2952181
| Pregunta | Respuesta |
| 103 PRODUCTO ESCALAR | Es una forma bilineal simétrica cuya forma cuadrática es definida positiva. Sea V un R-espacio vectorial, un producto escalar en V es una aplicación < , >: V x V ------> R que cumple las siguientes propiedades: 1.< u, v>=<v, u>; 2.<u+v, w>=<u, w>+<v, w> 3.<au,v>=a<u, v> 4. <u, u> >=0 y <u, u> =0 <----> u=0 |
| 103 ESPACIO VECTORIAL EUCLÍDEO | Un espacio vectorial euclideo es un par (V, < , >) formado por un espacio vectorial real V y un producto escalar definido en él. |
| 105 MATRIZ DE UN PRODUCTO ESCALAR | Sea (V, < , > ) un espacio vectorial euclídeo de dimensión finita y sea B=\[{u_{1} ,...,u_{n} }\] .Se llama matriz de Gram respecto de la base B a :\[ A=\left(\begin{array}{cccc} a_{11} & & & a_{1n}\\ a_{ij} =a_{ji} \\ \\ a_{n1} & & & a_{nn} \end{array}\right)\] Así pues la matriz de Gram es siempre simétrica |
| NORMA DE UN VECTOR | Sea (V, < , >) un espacio vectorial euclídeo, se define la norma de un vector u \[\epsilon\]V por: ||u||=\[sqrt{<u,}u>\] |
| 108 DESIGUALDAD DE SCHARTZ | Sea (V, < , > ) un espacio vectorial euclídeo.Para cada x,y \[\epsilon\] V se verifica: |< x , y >|\[\leq\] ||x|| ||y|| |
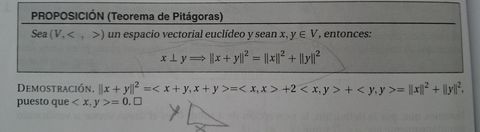
| 109 DESIGUALDAD TRIANGULAR | Sea (V, < , > ) un espacio vectorial euclídeo. Para cada x,y perteneciente a V se verifica: ||x+y||<=||x||+||y|| |
| ÁNGULO ENTRE VECTORES.VECTORES ORTOGONALES | LLamaremos ángulo entre los vectores x e y al único número real \[\alpha\],[0,pi] de forma que:\[cos\left(\alpha\right) =\frac{<x,y>}{\Vert x\Vert\Vert y\Vert}\] \[x\bot y\Leftrightarrow\]=0 |
| 111BASE ORTOGONAL Y ORTONORMAL | Es ortogonal si los vectores que forman la base, su producto escalar de sus vectores, dos a dos, es nulo. Y Ortonormal, si es ortogonal y además sus vectores son unitarios. Es decir con norma = 1 |
| 110 Matriz Ortogonal | |
| 112 Coeficientes de Fourier | |
| 113 Método de Gram-Schmidt | |
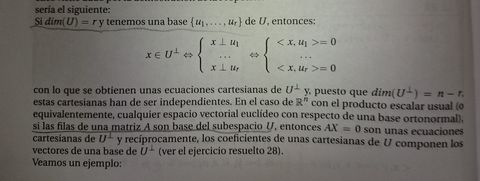
| 116 Complemento Ortogonal de un Subespacio Vectorial | |
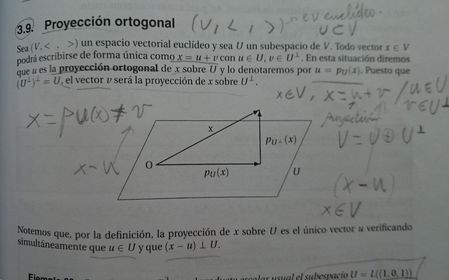
| 117 Proyección Ortogonal de un vector sobre un subespacio Vectorial | |
| 118 Teorema de Pitágoras | |
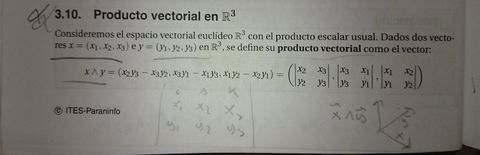
| 118 Producto Vectorial | |
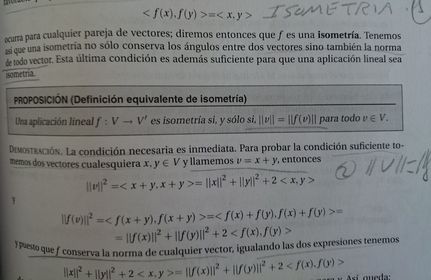
| 173 Isometría Vectorial | |
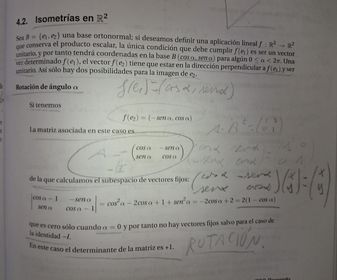
| 175 Rotación o giro de ángulo alfa en R2 | |
| 176 Simetría respecto a una rcta en R2 | |
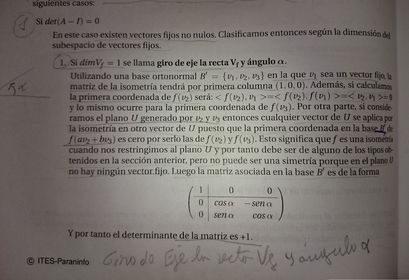
| 178 Giro en R3 | |
| 179 Simetría respecto a un plano en R3 | |
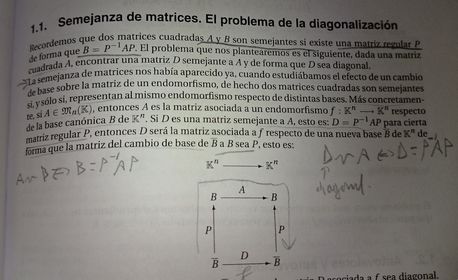
| 205 El problema de la Diagonalización | |
| 205 El problema de la Diagonalización 2 | |
| 206 Autovalor | |
| 206 autovector | |
| 207 Subespacio propio | |
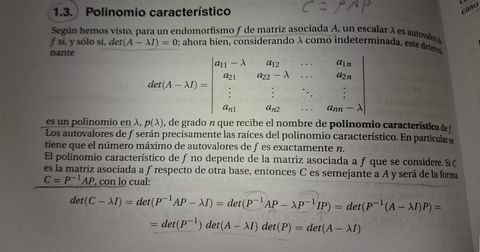
| 208 Polinomio Caracteristico | |
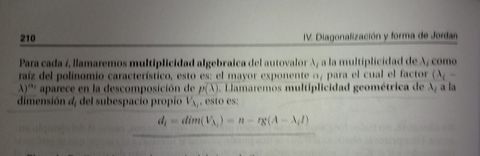
| 210 Multiplicidad algebraica y geométrica de un autovalor | |
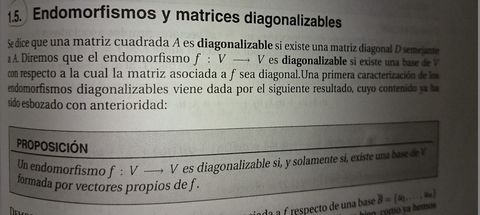
| 211 Endomorfismos y matriz diagonalizables | |
| Dem : Endomorfismo y matriz diagonalizables | |
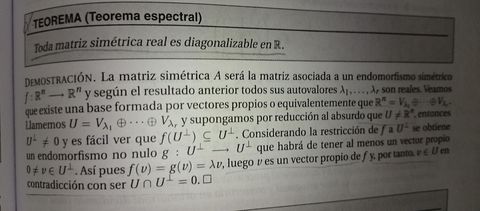
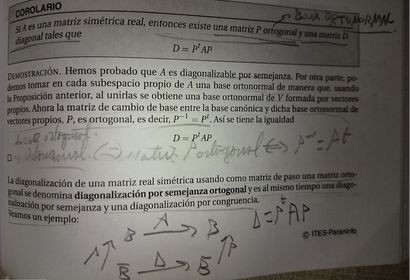
| 217 Teorema Espectral | |
| 217 Diagonalización por semejanza ortogonal de matrices reales simétricas | |
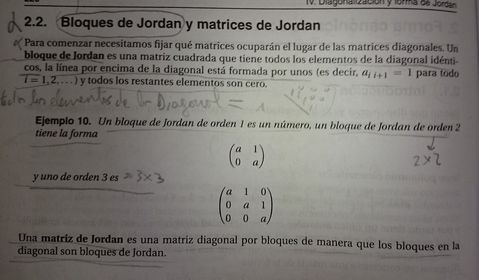
| 220 Bloque y matriz de Jordan | |
| 220 Forma canónica de Jordan | |
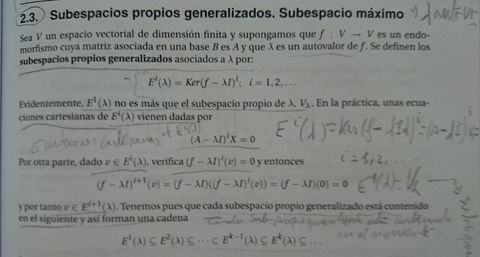
| 221 Subespacios propios generalizados | |
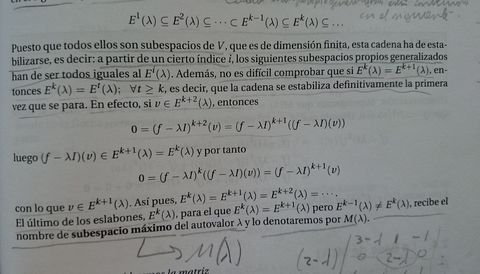
| 221 Subespacio Máximo | |
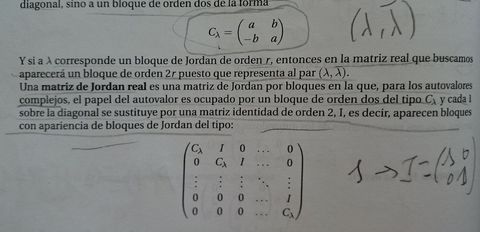
| 236 Matriz de Jordan real | |
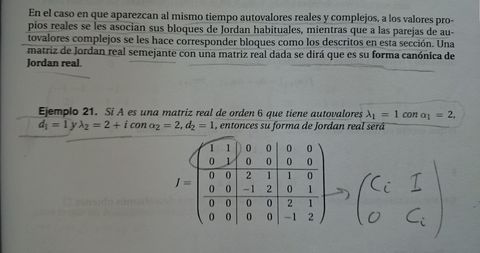
| 237 Forma Canónica de Jordan real | |
| 3 Endomorfismos linealmente equivalentes 3 Subespacio invariante por un endomorfismo |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
¿Quieres crear tus propias Fichas gratiscon GoConqr? Más información.